Die Steifigkeit des Z-Achsen-Systems läßt um den Faktor drei verbessern.
(Zum Vergrößern auf das Bild klicken)
Die Steifigkeit des Heizbetts des Ender 5 läßt sich mit überschaubarem Aufwand um den Faktor drei verbessern.
Die Nachgiebigkeit des Heizbetts in Z-Richtung ist die wohl offensichtlichste Schwachstelle des Ender 5. Dies hat schon unzählige Bastler zu den interessantesten Konstruktionen — vorwiegend riesigen Unterzügen aus Kunststoff bis hin einem komplett neuen Druckbett-Träger oder zu mehreren Z-Spindeln — inspiriert.
Die im folgenden vorgestellten Modifikationen verbessern die Steifigkeit des Druckbetts von ca. 23 N/mm auf ca. 70 N/mm, bestehen aber im wesentlichen nur aus ein paar hundert Gramm Aluminium und Schrauben.

Die Nachgiebigkeit des Heizbetts in Z-Richtung ist inhärenter Bestandteil der Konstruktion. Dazu tragen drei Faktoren bei:
An der grundsätzlichen Konstruktion als Kragträger mit Linearkugellagern, Rundstangenführungen und einer einzelnen Z-Spindel finde ich nichts auszusetzen — schließlich ist das Heizbett für 3d-Druck und nicht für Schwerzerspanung gedacht.
Indem der Heizbett-Träger zweiteilig ausgeführt ist, (ich nenne die beiden Komponenten künftig „Joch“ und “Trägerplatte“), kann die Z-Achsen-Kinematik aus Führungen, Antriebsspindel und Joch schon ab Werk ausgerichtet werden, und der Bausatz paßt immer noch in einen recht flachen Karton. Wäre das Joch Teil der Trägerplatte, müßte entweder:
Demnach ist die Design-Entscheidung, den Heizbett-Träger zweiteilig auszuführen, aus der Sicht des Konstrukteurs absolut nachvollziehbar.
Die große Ausladung ist durch die Rahmen-Geometrie bedingt, und das dünne Material wäre dann kein Problem, wenn sich Versteifungs-Rippen anbringen ließen.
Alle drei Schwächen werden im folgenden behoben.
Echte Verbesserungen lassen sich leichter erzielen, wenn sich der Zustand quantifizieren läßt — insbesondere, wenn es darum geht, wann es sinnvoll ist aufzuhören. Am leichtesten läßt sich die Steifigkeit in Bezug auf den Mittelpunkt des Heizbetts bestimmen. Deshalb wurde diese zur benchmark-Größe erkoren.
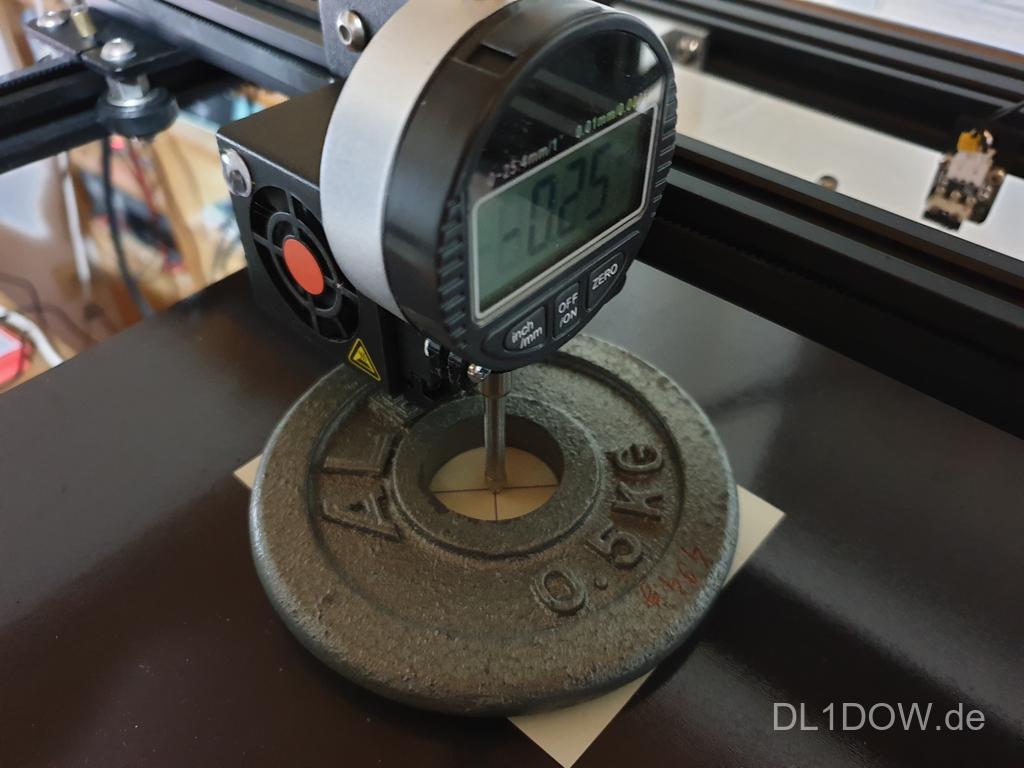
Der Mittelpunkt des Heizbetts läßt sich auf einem „Post It“ so markieren, daß später keine Rückstände bleiben. Das Heizbett wird mit zwei Hantelscheiben, bei denen die Masse der oberen Scheibe genau genug bekannt ist, so beschwert, daß sie genau konzentrisch über dem Mittelpunkt liegen. Die Meßuhr wird vom oberen Rahmen oder dem X-Schlitten auf dem Mittelpunkt ausgerichtet und genullt. Hebt man jetzt die obere Hantelscheibe an, ist die Rückfederung recht genau meßbar. Wird die Hantelscheibe wieder aufgelegt, läßt sich gut kontrollieren, ob sich etwas verschoben hat.
Bei mir stimmte der Nullpunkt bis auf letzte Nachkommastelle vor dem Aufnehmen und nach dem Zurücklegen. Die gemessene Rückfederung selbst bleibt auf ± 0,001 mm wiederholbar. Das liegt im Bereich der Auflösung der Meßuhr.

Im Gegensatz zu den anderen hier vorgestellten Umbauten ist dieser weitestgehend irreversibel, da die Trägerplatte bearbeitet wird. Generell läßt sich der Umbau problemlos konventionell mit Säge, Feile, Bohrmaschine und Anreißzeug herstellen, da mit dem Joch schon die perfekte Bohrschablone beiliegt. Da bei mir eine CNC-Fräse betriebsbereit vorhanden ist, habe ich sie allerdings für meinen Umbau auch genutzt.
Der Materialaufwand hält sich in Grenzen:
Bis auf die Schrauben und das V-Profil war alles schon bei mir in der Restekiste vorhanden.

Schritt 1 ist das Übertragen des Lochbilds des Jochs auf die Heizbett-Trägerplatte. Dies hat drei Effekte:
Wichtig: Auch wenn die Linearkugellager nur einen Durchmesser von 19 mm aufweisen, muß deren Zentralbohrung mindestens 21 mm Durchmesser aufweisen. Mit dem bloßen Auge nicht erkennbar ist ihr Flansch in der Mitte uneben. Liegt er dort auf, sind mysteriöse Winkelfehler die Folge.
Vier neue Bohrungen für die Heizbett-Höheneinstellschrauben lassen diese 6 mm nach vorn wandern.
Für die Spindelmutter werden Gewindebohrungen vorgesehen. So erspart man sich beim Zusammenbau die mühevolle Fummelei mit Muttern.
Generell lässt sich das problemlos mit Anreißnadel, Bohrmaschine und Feile erledigen, aber wenn man schon eine CNC-Fräse hat, geht es natürlich noch etwas komfortabler.

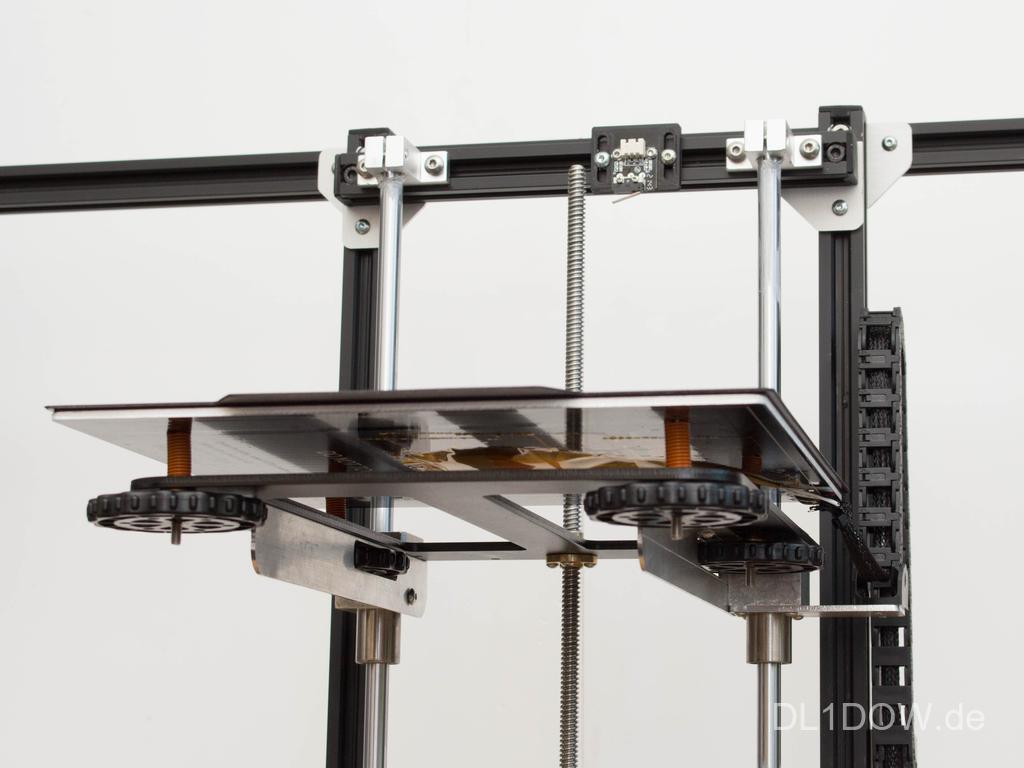
Da die Unterseite des Heizbett-Trägers jetzt eben ist, ist es sehr einfach, Versteifungsrippen anzubringen. Ich habe mich für L-Profil 25×15×1,6 mm aus Aluminium entschieden, weil es vorhanden war. Durch die Lage der Bettnivelliermuttern ist die der Rippen nahezu festgelegt.
Zwei Halteblöcke 30×30×20 mm ersparen es, beim Zusammenbau die acht Muttern für die Linearkugellager einzeln festhalten zu müssen. Da die Steifigkeit der Linearkugellager aber hauptsächlich im Flansch liegt, sind diese optional.
Die Z-Achsen-Mutter ist jetzt von unten direkt in den Heizbett-Träger eingeschraubt. Damit besitzt der Ender 5 nicht nur 10 mm mehr Druckraum in Z-Richtung, sondern insbesondere die Montage der Spindelmutter geht einfacher.

Durch den Entfall des Jochs wandert das Heizbett 30 mm nach hinten. Um diese 30 mm nicht als Druckraum zu verlieren, muß ein Ausgleich geschaffen werden. Der erste Teil des Ausgleichs waren die oben erwähnten neuen Bohrungen der Höheneinstellschrauben für das Heizbett, die es wieder 6 mm nach vorn bringen.
Zwei V-Slot-Profile 20×20 mm als senkrechte Streben parallel zu den Z-Führungen bringen das Heizbett um weitere 20 mm nach vorn. Damit die oberen Lagerblöcke nicht mit dem Druckkopf kollidieren können, wird gleichzeitig die obere Querstrebe um 15 mm abgesenkt. Die dann zu langen Z-Führungen können nach unten überstehen. Sie stehen nicht weiter als der Z-Motor nach unten heraus.
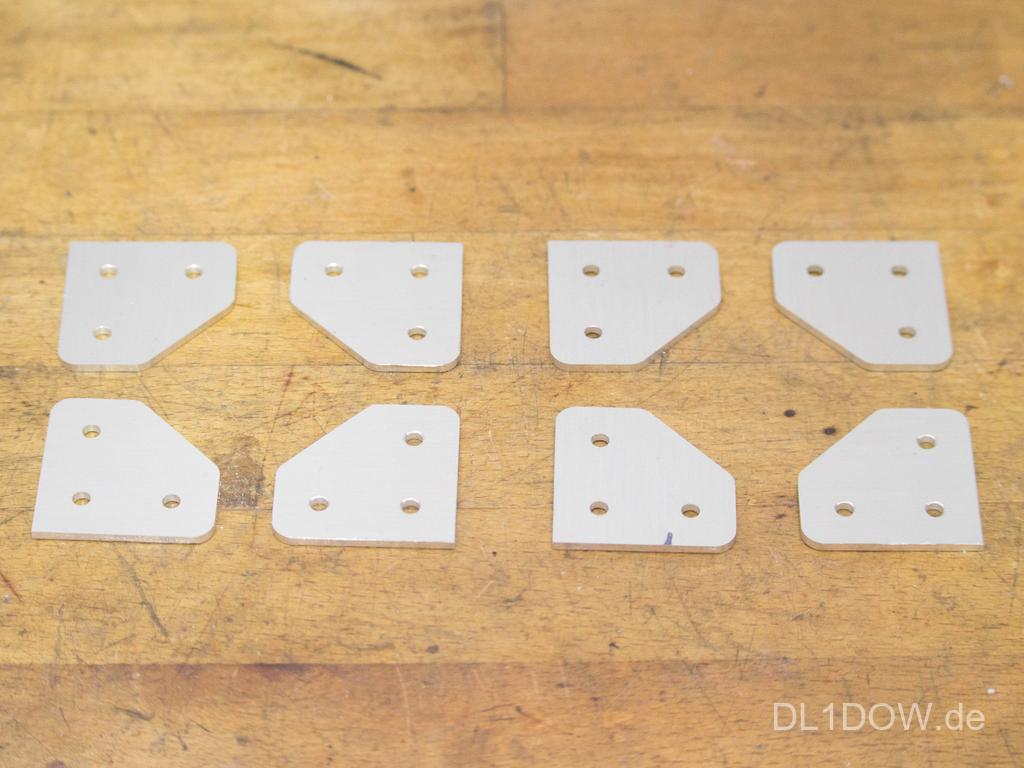
Acht Versteifungswinkel mit 2,4 mm Materialstärke verstreben das Z-Achsen-System in der X-Z-Ebene. Das bietet zwar von sich aus keine großen Vorteile, bringt aber die Z-Achsen-Führungen weitere 4,8 mm nach vorn.
Alles in allem ist das Heizbett also 0,8 mm nach vorn gewandert, so daß das Druckvolumen nicht negativ beeinflußt wurde.
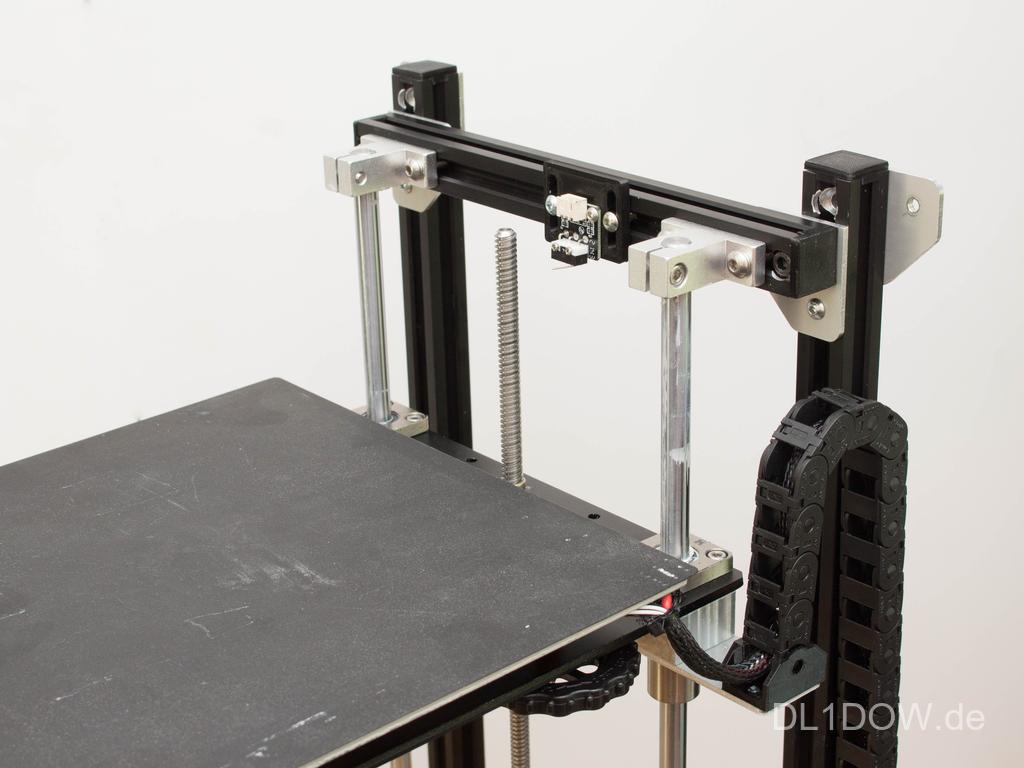
Will man weiterhin in den Genuß des vollen Druckraums kommen, muß der Endschalter für die Z-Achse geändert werden. Die entsprechende Halterung ist schnell gedruckt.
Das Anbringen einer Schleppkette für die Heizbett-Kabel wird durch die neue Rahmenstruktur sehr begünstigt. Es sind lediglich zwei Haltebleche und ein 3d-gedrucktes Endstück erforderlich.
Beim Umbau des Z-Achsen-Systems handelt es sich zwar um einen irreversiblen, jedoch verhältnismäßig unaufwendigen Eingriff. Die meisten Teile waren schon in der Restekiste vorhanden und recht preisgünstig.
Der bewegliche Teil des Z-Achsen-Systems ist durch den Umbau nur geringfügig (ca. 20 g) schwerer geworden. Die neuen Aluminiumteile und das entfallene Joch sind in etwa gleich schwer, nach dem Umbau sind jedoch ein paar Schrauben mehr vorhanden. Für die Dynamik der Z-Achse spielt das keine Rolle.
Die gemessene Steifigkeit hat sich verdreifacht. Die gefühlte Änderung ist jedoch, als hätte man ein ganz anderes Gerät. Nach der Versteifung des Ender 5 Pro in der X-Z-Ebene ließen sich alte G-Code-Dateien mit 150%…200% Geschwindigkeit ausdrucken, ohne daß Ringing-Effekte an Kanten in der X-Y-Ebene sichtbar werden. Bei höheren Geschwindigkeiten zeigte sich allerdings eine Schwingung in der Z-Richtung, die auch im Druckbild sichtbar war. Angeregt wurde diese Schwingung durch Unregelmäßigkeiten, z.B. das Überdrucken an Kreuzungen und Berührpunkten, um dann langsam abzuklingen.
Nach dem Z-Achsen-Umbau lassen sich dieselben G-Code-Dateien mit 250% Geschwindigkeit drucken, wobei die Druckqualität im Vergleich zu 100% mit dem Ender 5 Pro im Original-Zustand in nichts nachsteht.
Als Nebeneffekt geht jetzt das Nivellieren des Heizbetts mit Fühlerlehrenband deutlich einfacher und schneller, weil es an allen vier Nivellierpunkten gleich wenig nachgibt.
Bei höheren Druckgeschwindigkeiten kommt allerdings der Extruder an seine Grenzen. Der vorliegende Umbau hat damit wohl das Ende der Möglichkeiten erreicht, die mit Original-Komponenten möglich sind.
 |
Endschalterträger (STL) |
|
Fertigungsskizzen Haltebleche Schleppkette (DXF) |
|
Halterungen Schleppkette 10x11 R18 (STL) |
Es kommt noch:
Durch den Umbau wurde die Steifigkeit des Z-Achsen-Systems um den Faktor drei verbessert. Hier stellt sich natürlich die Frage, woher die verbliebene Nachgiebigkeit von immerhin fast 15 µm/N stammt. Die Antwort liegt in den vorliegenden Führungen mit Linearkugellagern.
Die Linearkugellager lassen sich leicht als Schuldige identifizieren, indem sie bei der Steifigkeitsmessung (s.o.) durch eine Klemmung ersetzt werden.
Die verbauten Linearkugellager des Ender 5 entsprechen dem Typ LMK10LUU und werden komplett trocken geliefert. Entsprechend ist auch das Rollgeräusch beim Verschieben. (Im Auslieferungszustand war es nicht hörbar, da die Z-Führungen leicht verspannt waren.)